機能概要
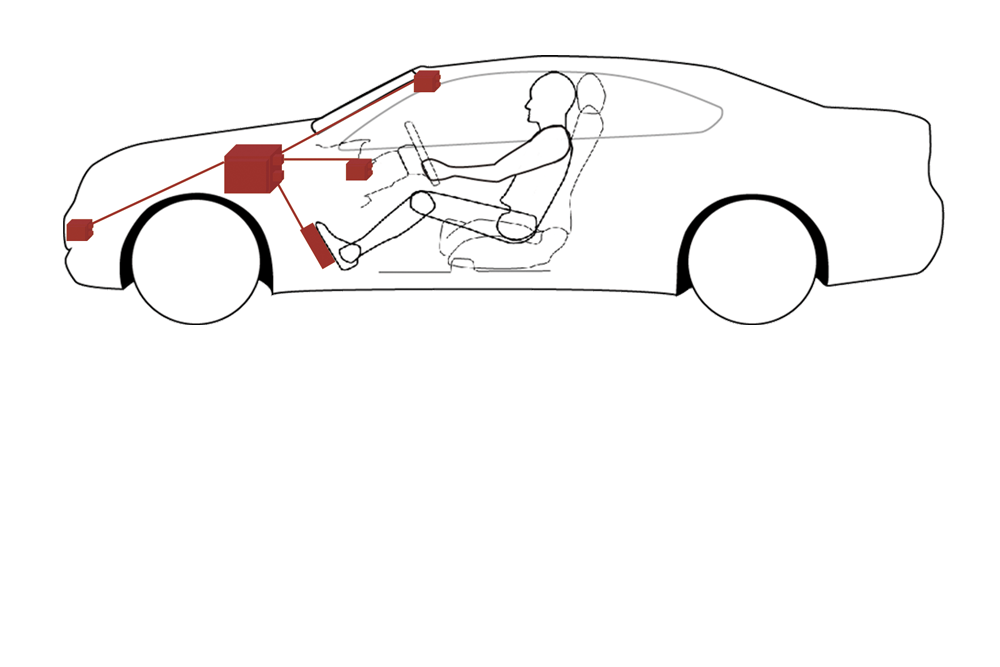
CAN Analyzerとは、ECUネットワーク全体および単体 ECUの開発、テスト、解析ができる汎用的なツールです。 分散システム全体または個々のECU開発の計画から開始までのプロセス全体にわたって、自動車メーカーおよびサプライヤーのネットワーク設計者、開発エンジニア、テストエンジニアの作業効率化をサポートします。
開発プロセスの初期段階で、CAN Analyzer を使用して ECUの動作シミュレーションモデルを作成します。 作成したモデルはそれ以降のECU開発の全段階にわたって、パスシステムとECUの解析、テスト、インテグレーションの基盤として使用可能です。 問題の早期発見、早期解決が可能です。
リアルタイム性能
リアルタイム性を最重視したシリーズです。ユーザー作成モデル情報(シナリオ)を製品内蔵RAMへダウンロードして実行する設計に徹底しました。 動作時 PCとの通信タイムラグが発生しない為、ユーザー作成モデルの動作を1msの精度で保証します。
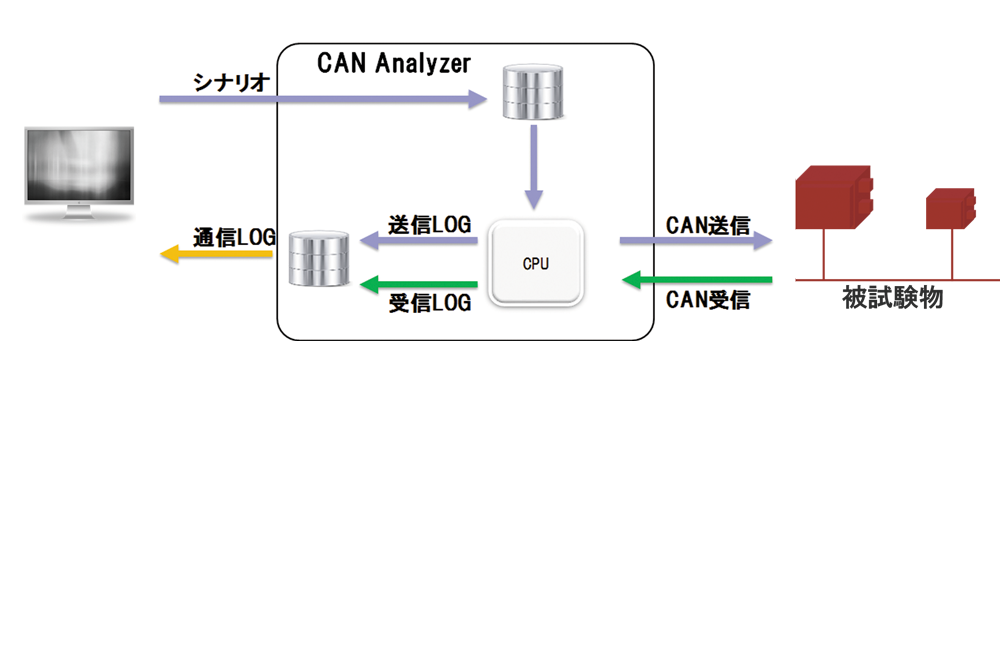
CAN受信時刻をマイコンが記録する為、通信LOGの精確(1ms精度)なタイムスタンプが保証されます。
REPLAY再生
実際環境(車走行中など)で発生したCAN BUSの通信データをロギングし、開発環境で通信LOGをREPLAY再生して、不具合の再現/検証が可能になります。
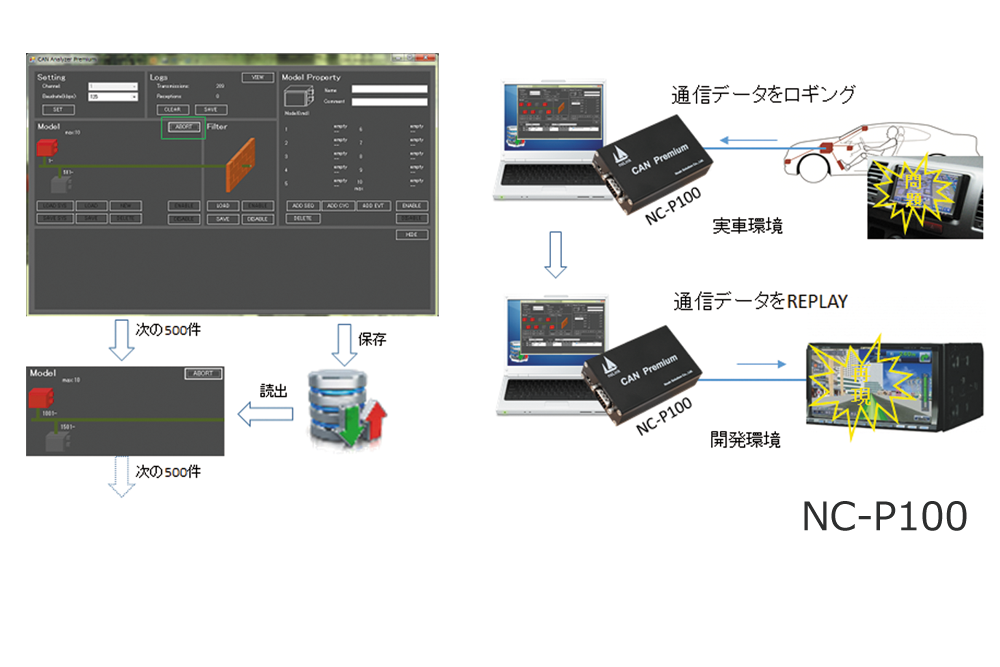
通信データと通信間隔をLOGファイルへロギングします。 REPLAY再生時、通信間隔も守った上、再生します。
トリガー連動
外部からのTRIGGER入力が可能になりました。(TRIGGER 入力は5Vで10ms以上入力必要です。)
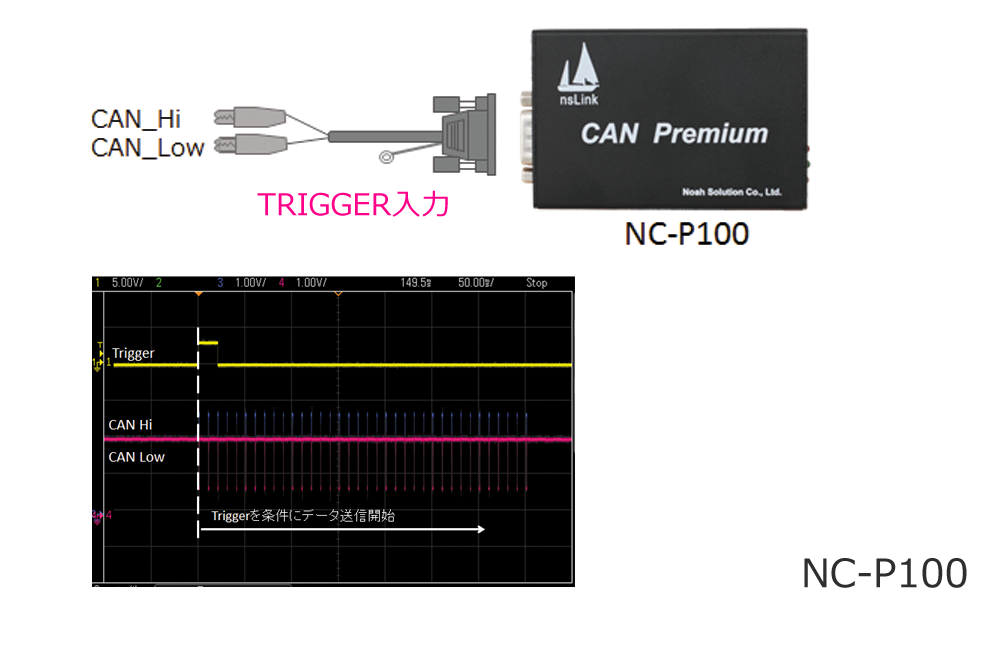
トリガー入力を検知した場合、特定CANデータを流したい場面で使用できます。例えば、車ACC信号と連動して、エンジンからの某通知を開始する場面などが考えられます。
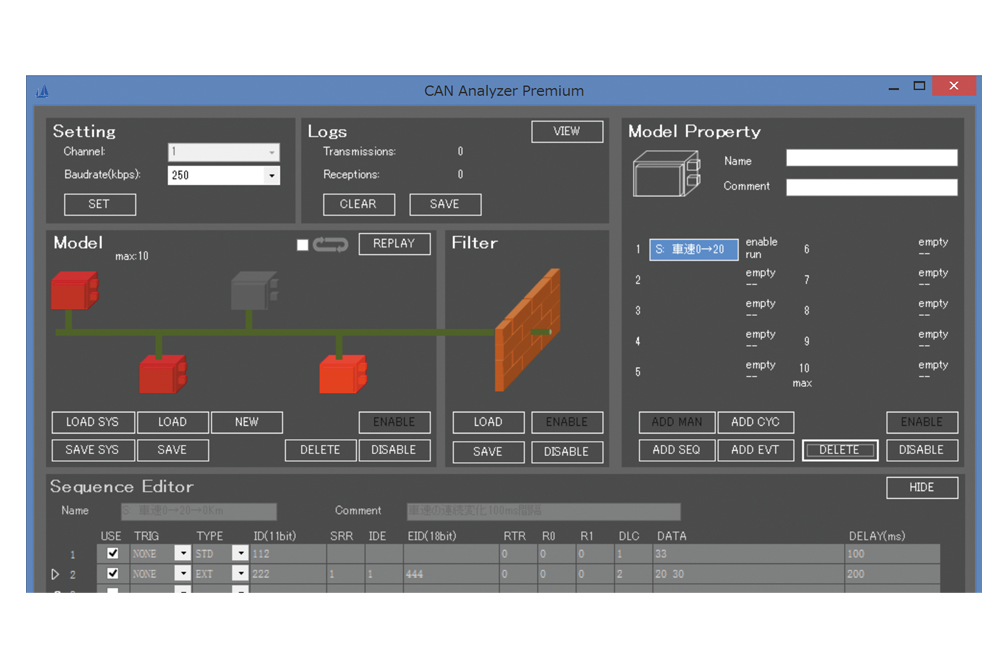
左側パネル
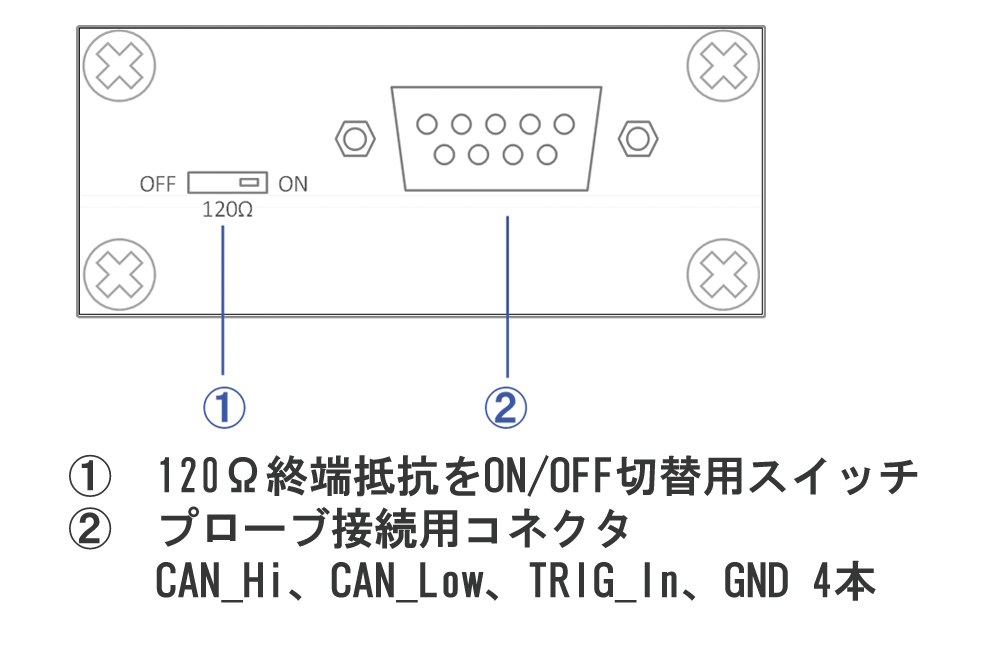
右側パネル
プログラム機能
◇プログラム機能とは、ユーザーにプログラムインターフェースを公開することで、ユーザーに独自APPを作成することが可能になり、もっとユーザーのニーズにフィットした効率の高い使い方(APP作成)が可能です。
プログラムインターフェースには主にシーケンス機能、トリガー機能、フィルター機能があります。
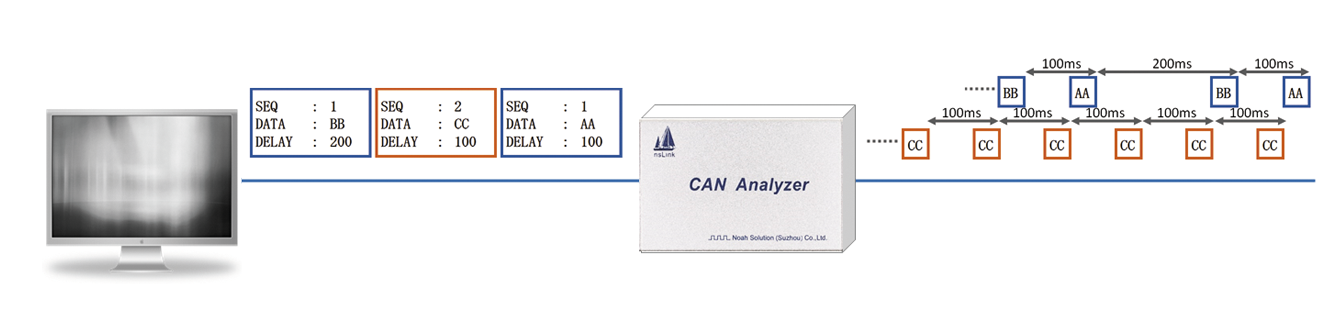
Sequence送信機能
特定順番でCAN BUS上にデータを流す場合に使用します。 シーケンスは最大100個グループまで作成可能です。 シーケンス毎に送信データの順番と送信データ間のDELAY時間の指定します。
Cycle送信機能
CAN BUS上に同じデータを定期的に流す場合に使用します。送信Frame IDとデータを周期が指定可能です。
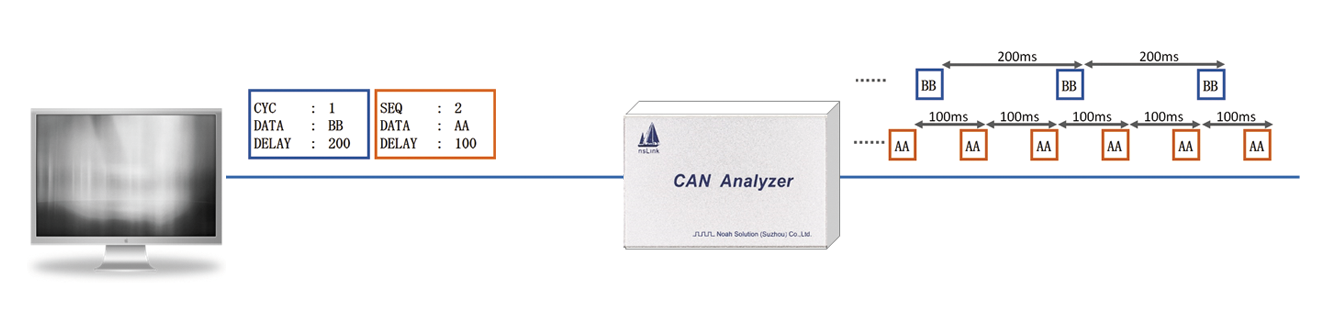
「BB」を200ms周期で定期送信します。 「AA」を100ms周期で定期送信します。
Event送信機能
特定条件を満たすCANデータを受信した場合、データ 送信(応答)を行いたい場合有効です。受信から応答までのDELAY時間も指定可能です。
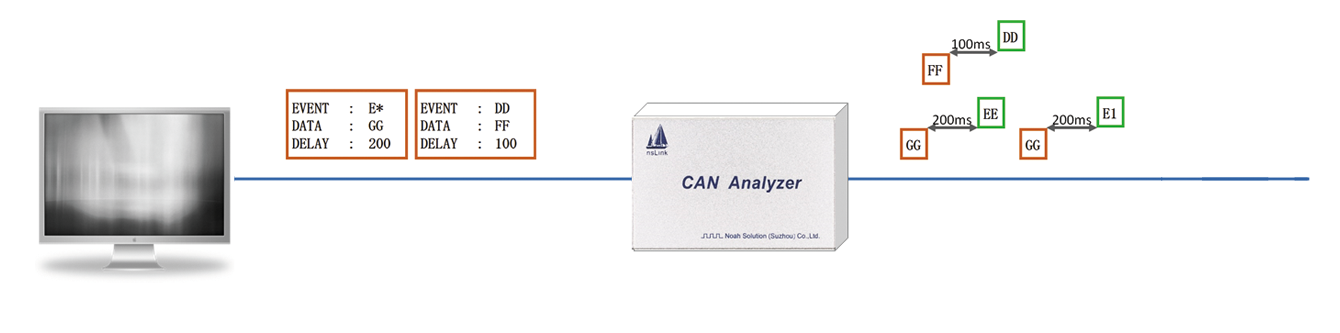
「E*」を受信した場合、200ms後に「GG」を送信します。「DD」を受信した場合、100ms後に 「FF」を送信します。
Filter機能
CAN BUSから必要のないデータを受信して、ログの量 が多くなるのを避ける場合に有効です。
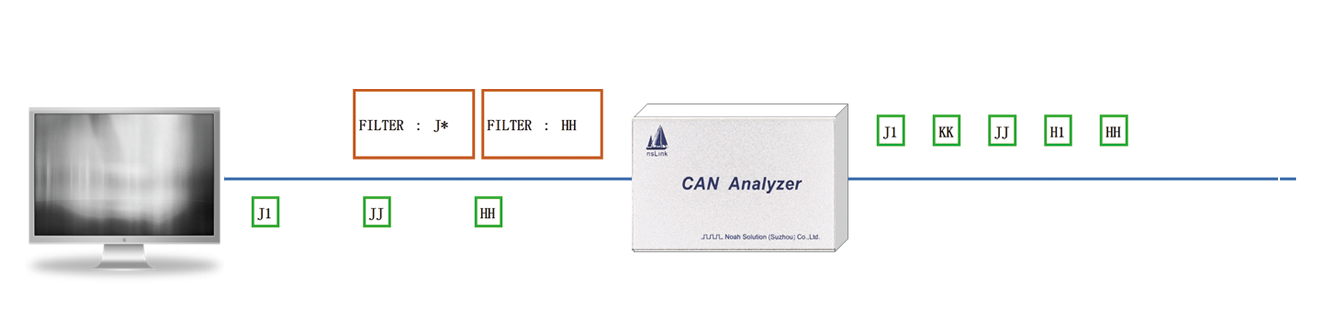
「J*」と「HH」を受信対象にします。 「KK」と「H1」を通信LOGから消します。
付属ソフト
・ボーレート(1k~1Mbps)の設定、ビッタイミンの設定が可能です。
・プログラム送信が可能です。(詳細はプログラム機能をご参照
・トリガー設定が可能です。
・フィルター設定が可能です。
・データロギング/REPLAYが可能です。
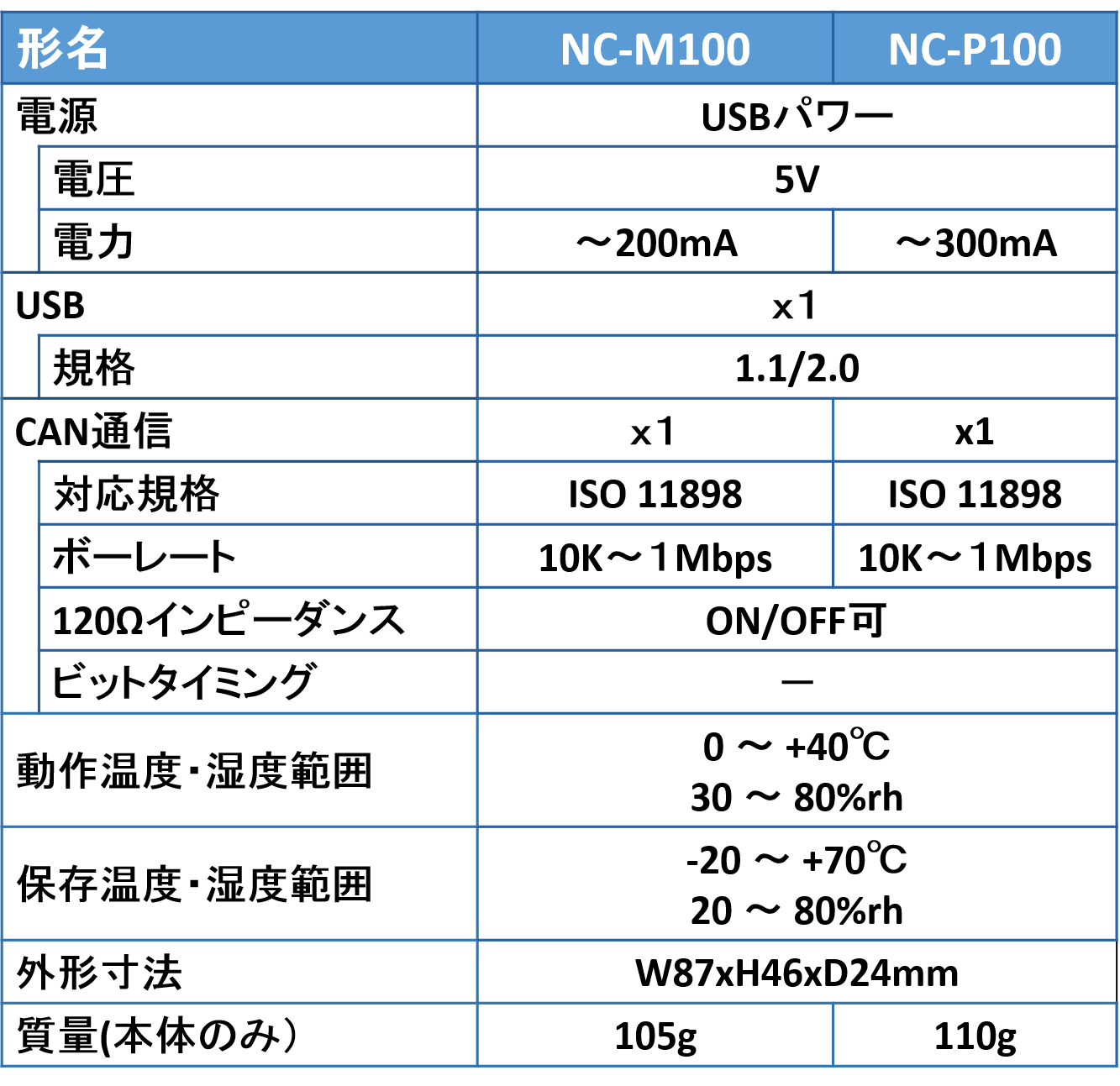
製品仕様